
{kind=link}
An Echo Sounder, also known as a Sonar Depth Finder or Sounder. It is a device used to measure the depth of water by transmitting sound pulses into the water and measuring the time it takes for the sound waves to bounce off the seabed or any objects below the surface and return to the device. It operates on the principle of echolocation like how bats navigate. This article details What is Echo Sounder, its Working Principles, Types, Uses, Differences with Sonar, Errors, Accuracy Checks, Components.
What is Echo Sounder?
Echo sounding is used to detect the depth of water, involves transmitting acoustic waves into water and recording the time interval between the emission and return of a pulse. It is used for ranging other targets like fish schools. Echo-sounding is a faster method of measuring depth than the older technique of lowering a sound line until it reached bottom.
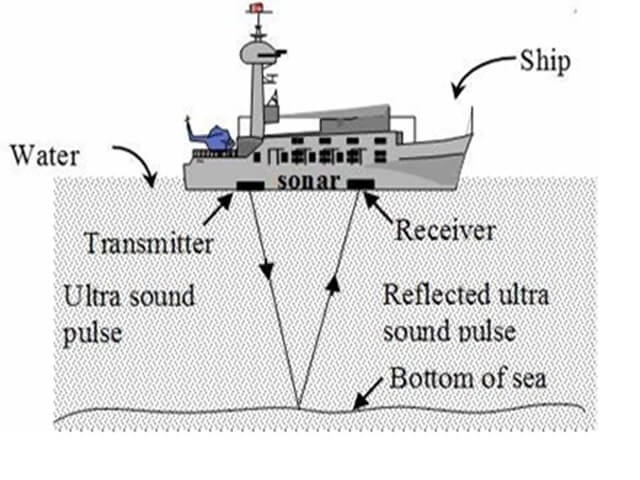
It is used by the operators on the watch to get accurate information. And also, used to measure the depth of the water and mainly the under-keel clearance. It transmits sounds from the bottom of the ship to the sea bed. Transmitter, transducer, receiver, and display unit are the main components. Moreover, the transducer can be either electro-strictive or magneto-strictive.
Working of Echo Sounder
Magneto strictive transducers use iron, cobalt and nickel. Magnetostriction is effective up to a few hundred-kilohertz frequencies. For electrostriction, it uses various types of lead materials and works on compressive or tensional forces. These forces will create a change of length or dimension in the material.
The unit of display can be a paper recorder, video type or digital info display.
The formula used by the echo sounder is – distance = speed x time / 2.
The transmitter creates an electrical pulse which later passes through the transducer. The transducer located at the bottom of the ship converts it in to sound waves. These sound waves may either hit the sea bed or anything in between.
As soon as the transducer receives back the sound waves, it is converted back to current and reflected on a digital or video display.
Types of Echo Sounder
There are two types of Echo Sounder-
Single-Beam Echo Sounders (SBES)
These sounders were developed 80 years ago. They were used instrumentally for basic oceanic discoveries and standardization. Single-beam echo sounders are also known as fathometer or depth sounder. They work on a single sound pulse in a single narrow beam and mainly they can measure one point per echo.
In recent days, single beam echo sounders are used for depth measurements, sub-bottom measurements and seabed imaging.
Multi-Beam Echo Sounders (MBES)
These multi-beam echo sounders releases a multidirectional beam to get information in the affected area. The returned sound waves by transducers provides clear information about the depth of the water, the shape of the river, lake and other underwater features.
Use of Echo Sounder
The operator checks his watch if the equipment is working properly and has all the set up before using the echo sounder. Initially, the operator has to be familiar with the mode of options of the echo sounder in order to avoid confusion and the grounding will be prevented if possible. The navigation mode will be the normal mode. In navigation mode, the echo sounder measures the depth of the water from the transducer position to the seabed. Sometimes, it is known as the under keel clearance.
The next available mode is draft below the surface (DBS). This is the depth of water which includes the draft of the vessel. To enter the ship’s draft, there is a draft button also. The history and log data mode allows the officers to see ship’s previous readings along with the data recorded in the echo sounder.
How to Check Accuracy of Echo Sounder?
The Echo Sounder must be set properly before it gives an accurate reading. The initial setting can be done in two stages –The moment of transmission, the echo sounder must be set to the depth of transducers below the waterline. And also, the speed of the echo sounder stylus is aligned with the sound velocity in seawater.
The bar check is the most widely used technique by industry experts to check echo sounder. This is insisted for shallow waters up to depths of about 300 meters, at which a good clear echo can be received from the bar. However, it is very difficult to check the accuracy of echo sounders in the shallow waters. The weather must be good enough with good wind, smooth and calm area and tidal streams are loose.
The transducer is very close to the seabed and hence it is difficult to know when the echo is actually received. The form of the seabed, strong current and drift can greatly affect the sound waves whereas the readings can be doubtful.
Components of Echo Sounder
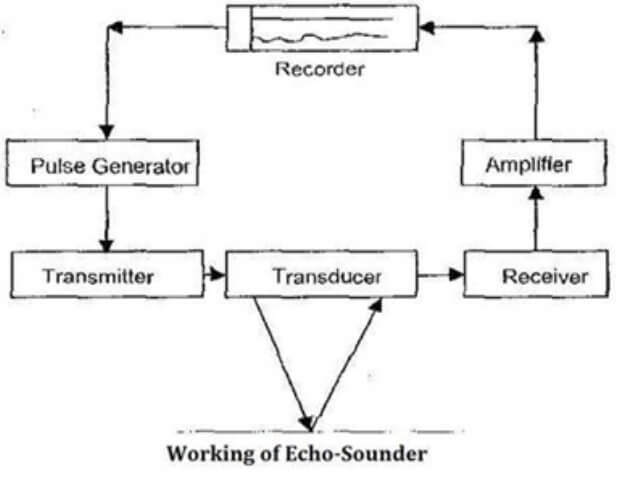
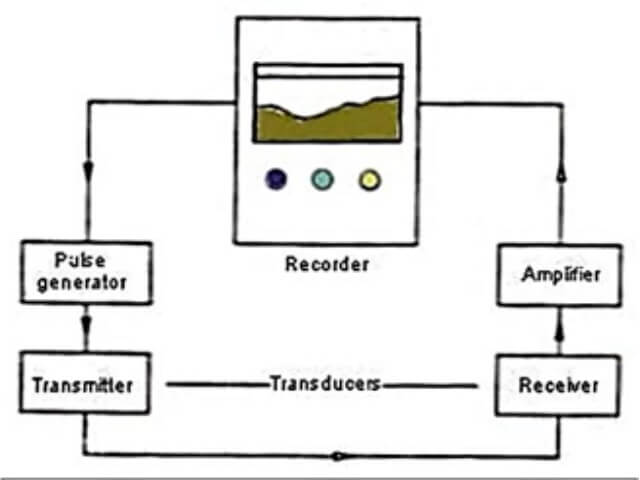
Echo Sounder has the following basic components –
Transducer
It is used to generate the sound vibrations and it also receives the reflected sound vibration.
Pulse Generator
For the transmitting transducer, this pulse generator produces electrical oscillations.
Amplifier
The amplifier amplifies the weak electrical oscillations which is generated by the receiving transducer on reception of the reflected sound vibration.
Recorder
It is used to measure and indicate depth.
Principles Used – Working of Echo Sounder
There are two principles used–
Ranging
In echo sounder, the stylus is mounted on a circular belt driven by means of a stylus motor which moves at a certain speed and transmission takes place when the stylus passes the zero marks. A magnet fixed on the stylus belt triggers the transmitter to transmit a pulse every rotation of belt when stylus is at zero mark on the paper scale. The transmission on the acoustic waves from the transducer is combined with the stylus at the zero mark. To overcome certain issues, some of echo sounding machines work on phasing technique.
Phasing
The speed of the stylus motor remains constant during phasing. The transmission point is advanced, instead of changing the speed of the stylus. Different sensors are placed around the stylus belt. When the magnet passes the sensors, generates the pulse and in turns activates the transmitter. To note an important point is when using phasing technique, we must always start sounding at lowest range and check for echoes. If needed adjust the gain control and then switch over to higher range.
Errors of Echo Sounder
Below mentioned are some of the errors –
- Velocity of propagation in water
- Stylus speed error
- Pythagoras error
- Multiple echoes
- The thermal and density layers
- Zero-line adjustment error
- Cross Noise
- Aeration
Difference between Sonar and Echo Sounder
Both are quite similar. However, they have few differences –
| Echo Sounder | Sonar |
| Allows a ship to measure the depth of water and under keel clearance from under the ship only. | The sonar provides a wide picture of underwater as it utilizes an adjustable transducer which enables to scan 360 degrees. |
| It uses transducer which is mounted on a fixed position at the keel of the vessel. | It uses stronger frequency and uses transmitter and receiver that has the capability of transmitting and detecting ultrasonic waves. |
| The principle direction of echo sounder is vertical that uses single or multiple beams. | Sonar is widely used by military vessels like warships, submarines and aircraft carriers. |
| It is widely used by merchant ships, trawlers, tug boats, yachts and similar vessels. |
Also Read: Ship’s permanent magnetic field
3tg79z
yeqyty
I think this web site contains some rattling superb info for everyone : D.
vi36m6
cbowm0
1ezj4o
fac9t4
fryrma
pmgkyh
My brother recommended I might like this blog. He was once totally right. This put up actually made my day. You can not imagine just how so much time I had spent for this information! Thanks!
Hi, just required you to know I he added your site to my Google bookmarks due to your layout. But seriously, I believe your internet site has 1 in the freshest theme I??ve came across. It extremely helps make reading your blog significantly easier.
ec7naw
837dc2
I don’t ordinarily comment but I gotta state regards for the post on this great one : D.
2ndp5r
I enjoy the efforts you have put in this, thanks for all the great blog posts.
gr3dgl
The subsequent time I learn a blog, I hope that it doesnt disappoint me as a lot as this one. I imply, I know it was my option to learn, however I actually thought youd have something fascinating to say. All I hear is a bunch of whining about one thing that you possibly can repair in case you werent too busy searching for attention.
y7tuba
skyrqo
5o6q9g
But a smiling visitor here to share the love (:, btw great pattern.
Hello there! I know this is kinda off topic but I was wondering if you knew where I could find a captcha plugin for my comment form? I’m using the same blog platform as yours and I’m having problems finding one? Thanks a lot!
u8oish
gh4c6p
t22nao
We are a group of volunteers and opening a new scheme in our community. Your site provided us with valuable info to work on. You’ve done an impressive job and our whole community will be grateful to you.
I have not checked in here for a while because I thought it was getting boring, but the last several posts are great quality so I guess I’ll add you back to my everyday bloglist. You deserve it my friend 🙂
f8z4yu
I’m truly enjoying the design and layout of your site. It’s a very easy on the eyes which makes it much more enjoyable for me to come here and visit more often. Did you hire out a developer to create your theme? Excellent work!
erfy63
bh5fhs
Real clean site, regards for this post.
Your house is valueble for me. Thanks!…
1l60fp
rxumko
You made some good points there. I did a search on the subject matter and found most guys will agree with your website.
Hello there, just became aware of your blog through Google, and found that it’s truly informative. I am gonna watch out for brussels. I will be grateful if you continue this in future. A lot of people will be benefited from your writing. Cheers!
I like this website its a master peace ! Glad I observed this on google .
Definitely, what a magnificent site and revealing posts, I will bookmark your site.All the Best!
I carry on listening to the newscast lecture about getting boundless online grant applications so I have been looking around for the top site to get one. Could you advise me please, where could i find some?
Good clarity
Hello! I could have sworn I’ve been to this blog before but after browsing through some of the post I realized it’s new to me. Anyways, I’m definitely happy I found it and I’ll be book-marking and checking back frequently!
cosm75
Spot-on observations
Keep working ,splendid job!
I really appreciate this post. I¦ve been looking all over for this! Thank goodness I found it on Bing. You’ve made my day! Thx again
Hey There. I discovered your blog the use of msn. That is a very neatly written article. I?ll be sure to bookmark it and return to learn more of your useful information. Thank you for the post. I?ll definitely return.
Hello there! I know this is kinda off topic but I’d figured I’d ask. Would you be interested in trading links or maybe guest authoring a blog post or vice-versa? My website goes over a lot of the same subjects as yours and I feel we could greatly benefit from each other. If you happen to be interested feel free to send me an e-mail. I look forward to hearing from you! Excellent blog by the way!
I am thankful that I detected this web blog, just the right info that I was searching for! .
I like the efforts you have put in this, appreciate it for all the great articles.
Appreciating the hard work you put into your website and detailed information you offer. It’s good to come across a blog every once in a while that isn’t the same outdated rehashed material. Wonderful read! I’ve bookmarked your site and I’m adding your RSS feeds to my Google account.
I believe this site holds some very fantastic information for everyone. “The penalty of success is to be bored by the attentions of people who formerly snubbed you.” by Mary Wilson Little.
Wow! Thank you! I always needed to write on my website something like that. Can I include a fragment of your post to my blog?
I’m really loving the theme/design of your weblog. Do you ever run into any web browser compatibility problems? A couple of my blog visitors have complained about my site not operating correctly in Explorer but looks great in Chrome. Do you have any suggestions to help fix this problem?
Hi, just required you to know I he added your site to my Google bookmarks due to your layout. But seriously, I believe your internet site has 1 in the freshest theme I??ve came across. It extremely helps make reading your blog significantly easier.
Some genuinely tremendous work on behalf of the owner of this web site, dead great subject material.
I was suggested this web site by way of my cousin. I am not positive whether this publish is written via him as no one else recognise such exact approximately my trouble. You are incredible! Thanks!
**mitolyn reviews**
Mitolyn is a carefully developed, plant-based formula created to help support metabolic efficiency and encourage healthy, lasting weight management.
Thank you for some other informative website. Where else may just I am getting that type of info written in such a perfect manner? I have a challenge that I’m simply now running on, and I have been at the glance out for such information.
Best Casino Australia Real Money Massive Jackpot Hunt Begins
voice voip [url=https://otvetnow.ru]https://otvetnow.ru[/url] united states bankruptcy court northern district of illinois
You have mentioned very interesting details ! ps decent site.
This is a very good tips especially to those new to blogosphere, brief and accurate information… Thanks for sharing this one. A must read article.
I have been exploring for a little for any high quality articles or weblog posts on this sort of area . Exploring in Yahoo I finally stumbled upon this website. Reading this information So i’m satisfied to show that I’ve a very good uncanny feeling I came upon just what I needed. I such a lot surely will make sure to do not omit this website and give it a glance on a constant basis.
k8iix6
otklq4
**back biome**
Backbiome is a naturally crafted, research-backed daily supplement formulated to gently relieve back tension and soothe sciatic discomfort.
vpwtru
fdx15t
Great explanation of how echo sounders work! I think it’s fascinating how this technology mimics echolocation, just like how bats navigate. I wonder how the accuracy of these devices is affected by different water conditions, like salinity or temperature?
Thanks for breaking down the working principle of echo sounders so clearly—especially the echolocation comparison was helpful in understanding how they function differently from regular sonar systems. As someone working with marine navigation data, I appreciate the practical insights on accuracy checks and common errors, which are often overlooked in technical discussions.
1ndrfv
sxej8q
xigtkk
Thank you for the auspicious writeup. It in fact was once a leisure account it. Glance complicated to more delivered agreeable from you! However, how can we keep up a correspondence?
I truly value your piece of work, Great post.
8k92is
7yavkf
Very nice post and straight to the point. I don’t know if this is truly the best place to ask but do you people have any ideea where to hire some professional writers? Thanks in advance 🙂
6orl1w
Great breakdown of these core marine systems; the section regarding error factors and accuracy checks is especially pertinent for those of us involved in navigational reliability. Do you find that ambient noise processing in significantly shallow water remains the biggest hurdle for overall system precision?
kevn7g
4m1pso
As soon as I discovered this site I went on reddit to share some of the love with them.
aphri4
jzbxco
q2ja89
un0n4s
fv0r6u
I enjoy, lead to I discovered just what I was looking for. You’ve ended my four day lengthy hunt! God Bless you man. Have a great day. Bye
Hello! I simply wish to give an enormous thumbs up for the great data you’ve got here on this post. I will be coming again to your weblog for extra soon.
9x4mrl
xqvujp
Excellent breakdown of echo sounder principles — the comparison between active and passive sonar is particularly clear here. Understanding the physics behind depth measurement is fundamental for anyone studying marine electronics or navigation systems.
qaleop
a680xy
fq6j02
uzp0dg
5ui3sd
7o6ps1
I love looking at and I conceive this website got some truly useful stuff on it! .
Such a high quality resource. Thanks for putting this together.
Great content simple to follow but still very in depth.
Technical explanations are easier to study when recorded lectures or walkthroughs become text. NeatScribe can help turn spoken learning materials into notes.
You really make it seem so easy with your presentation but I find this matter to be really something that I think I would never understand. It seems too complex and very broad for me. I’m looking forward for your next post, I will try to get the hang of it!
I am glad for writing to make you be aware of of the terrific encounter my princess went through visiting your web site. She picked up a good number of things, with the inclusion of what it’s like to have an incredible teaching heart to make a number of people clearly completely grasp some hard to do topics. You truly surpassed our own expected results. I appreciate you for presenting those warm and helpful, safe, revealing and even easy thoughts on that topic to Emily.